 |
Seeed Grove ++
v0.0.1-2019
Linux C++ Library For Seeed Grove Devices
|


|
|
Seeed Grove ++
v0.0.1-2019
Linux C++ Library For Seeed Grove Devices
|
|
BeagleBone hardware watchdog. More...
#include <sg_BeagleBone_Watchdog.hpp>
Public Member Functions | |
| virtual | ~Watchdog (void) |
| Destructor. More... | |
| Watchdog (const size_t timeout_in_seconds=60) | |
| Constructor. More... | |
| virtual Watchdog & | kick (void) |
| Kick the watchdog to prevent it from triggering a reboot. More... | |
| virtual Watchdog & | magic_close (void) |
| Attempt to stop kicking the watchdog. More... | |
| virtual size_t | get_timeout (void) |
| Get the watchdog timeout (in seconds). More... | |
| virtual Watchdog & | set_timeout (const size_t timeout_in_seconds=60) |
| Set the watchdog timeout (in seconds). More... | |
| virtual size_t | get_seconds_remaining_before_reboot (void) |
| Get the amount of time left before the watchdog triggers a reboot. More... | |
| virtual watchdog_info | get_info (void) |
| Get some simple information from the OMAP watchdog driver. More... | |
| virtual int | get_status (void) |
| Get some status information on the watchdog. More... | |
| virtual int | get_boot_status (void) |
| Get some information on the cause of the last reboot. More... | |
| virtual Watchdog & | start_simple_thread (const size_t sleep_time_in_seconds=45) |
| Calling this will start run_simple_loop() on a secondary thread. More... | |
| virtual Watchdog & | stop_simple_thread (void) |
| Stop the secondary watchdog thread started by start_simple_thread(). More... | |
| virtual Watchdog & | run_simple_loop (const size_t sleep_time_in_seconds) |
| Never-ending loop that will periodically call kick() to update the watchdog. More... | |
| bool | is_valid (void) const |
| Determine if the watchdog handle seems to be valid. More... | |
Protected Attributes | |
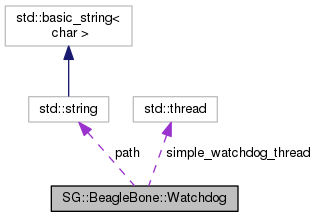
| std::string | path |
Path to the watchdog. Typically will be /dev/watchdog. More... | |
| SharedFileDescriptor | shared_fd |
| File descriptor for the watchdog device. More... | |
| std::thread | simple_watchdog_thread |
| Secondary watchdog thread. Only used when start_simple_thread() has been called. More... | |
| std::atomic< bool > | watchdog_can_continue |
| Secondary watchdog thread. Only used when start_simple_thread() has been called. More... | |
BeagleBone hardware watchdog.
Once the watchdog on BeagleBone Green (BBG) or BeagleBone Black (BBB) has been activated, it cannot be stopped. The default watchdog timeout is 60 seconds, but it can be changed to a different value with set_timeout().
Creating one of these objects does not automatically activate the watchdog. A call must be made to either kick() or start_simple_thread() to activate it.
|
virtual |
Destructor.
If start_simple_thread() has been called, the destructor will ensure that the secondary thread is stopped when the object goes out of scope.
References shared_fd, and stop_simple_thread().

| SG::BeagleBone::Watchdog::Watchdog | ( | const size_t | timeout_in_seconds = 60 | ) |
Constructor.
This does not activate the watchdog. The only way to activate the watchdog is to call start_simple_thread(), or periodically call kick(). Once activated, if the watchdog isn't updated regularly, the BeagleBone will reboot.
There are two ways to use the Watchdog class:
First method:
Second method:
References is_valid(), set_timeout(), and shared_fd.

|
virtual |
Get some information on the cause of the last reboot.
WDIOC_GETBOOTSTATUS References is_valid(), and shared_fd.
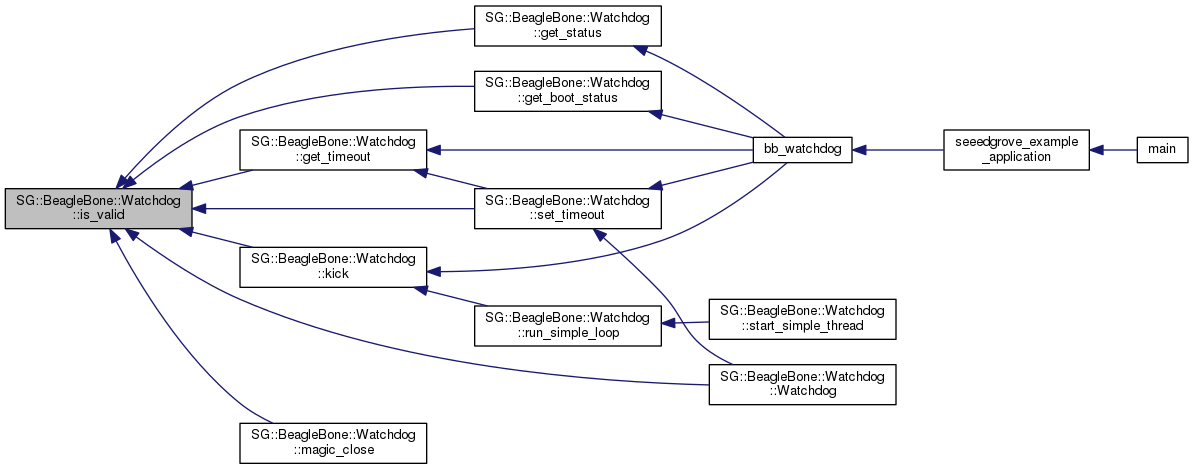
Referenced by bb_watchdog().


|
virtual |
Get some simple information from the OMAP watchdog driver.
The options are a combination of the WDIOF_... flags defined in watchdog.h. For example, 0x8180:
WDIOF_KEEPALIVEPING 0x8000 // Keep alive ping replyWDIOF_MAGICCLOSE 0x0100 // Supports magic close charWDIOF_SETTIMEOUT 0x0080 // Set timeout (in seconds)WDIOC_GETSUPPORT References shared_fd.
Referenced by bb_watchdog().

|
virtual |
Get the amount of time left before the watchdog triggers a reboot.
WDIOC_GETTIMELEFT References shared_fd.
Referenced by bb_watchdog().

|
virtual |
Get some status information on the watchdog.
WDIOC_GETSTATUS References is_valid(), and shared_fd.
Referenced by bb_watchdog().


|
virtual |
Get the watchdog timeout (in seconds).
By default, the watchdog timeout is set to 60 seconds. This determines the maximum length of time that can elapse between calls to kick() without triggering a reboot.
WDIOC_GETTIMEOUT References is_valid(), and shared_fd.
Referenced by bb_watchdog(), and set_timeout().


|
inline |
Determine if the watchdog handle seems to be valid.
References shared_fd.
Referenced by get_boot_status(), get_status(), get_timeout(), kick(), magic_close(), set_timeout(), and Watchdog().
|
virtual |
Kick the watchdog to prevent it from triggering a reboot.
This needs to be called relatively often to prevent the watchdog from triggering a reboot. For example, if the timeout is set to 60 seconds (the default timeout value) then kick() must be called at intervals of 59 seconds or less to prevent a reboot.
WDIOC_KEEPALIVE If you periodically call kick() from within your code, then don't start the watchdog's simple thread. Otherwise, the watchdog object's simple thread regularly calling kick() will completely defeat manually calling kick().
References is_valid(), and shared_fd.
Referenced by bb_watchdog(), and run_simple_loop().


|
virtual |
Attempt to stop kicking the watchdog.
Normally, once the watchdog has been activated, the device will reboot if too much time elapses between calls to kick(). But if the watchdog driver was built without CONFIG_WATCHDOG_NOWAYOUT, then there may be a way to close the watchdog without triggering a reboot.
If the kernel was built with CONFIG_WATCHDOG_NOWAYOUT, you'll find a message similar to this one in dmesg or /var/log/syslog: watchdog watchdog0: nowayout prevents watchdog being stopped!
References is_valid(), and shared_fd.

|
virtual |
Never-ending loop that will periodically call kick() to update the watchdog.
This is typically started by calling start_simple_thread(), and wont return until stop_simple_thread() is called.
| [in] | sleep_time_in_seconds | Determines how long to sleep between calls to kick(). |
This method is usually called on a secondary thread by start_simple_thread(), though it could also be called directly from user code if required.
References kick(), and watchdog_can_continue.
Referenced by start_simple_thread().


|
virtual |
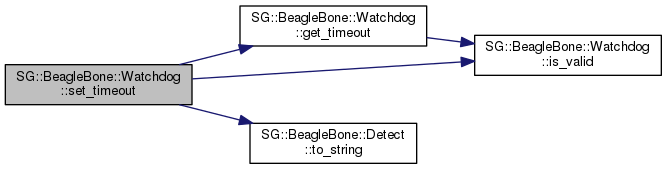
Set the watchdog timeout (in seconds).
By default, the watchdog timeout is set to 60 seconds. This determines the length of time that can elapse between calls to kick() without triggering a reboot.
WDIOC_SETTIMEOUT | std::invalid_argument | if the watchdog timeout cannot be set. |
References get_timeout(), is_valid(), shared_fd, and SG::BeagleBone::Detect::to_string().
Referenced by bb_watchdog(), and Watchdog().

|
virtual |
Calling this will start run_simple_loop() on a secondary thread.
Instead of periodically calling kick(), you can have a loop running on a secondary thread to regularly update the watchdog. Because this runs on a secondary thread, it wont detect some kinds of problems such as deadlocks that would be detected by directly calling kick(). But this greatly simplifies the use of watchdog in some applications, and will trigger a reboot if the application that instantiated the Watchdog object aborts, or if the device completely stops responding.
It is safe to call this multiple times.
| [in] | sleep_time_in_seconds | Determines how long the secondary thread will sleep between calls to kick(). |
If you call start_simple_thread(), then there is no need to manually call kick() within your code.
References run_simple_loop(), simple_watchdog_thread, stop_simple_thread(), and watchdog_can_continue.

|
virtual |
Stop the secondary watchdog thread started by start_simple_thread().
If the watchdog is active, this will eventually cause a reboot once the timeout period is reached. (Default is 60 seconds.)
It is safe to call this multiple times.
References simple_watchdog_thread, and watchdog_can_continue.
Referenced by start_simple_thread(), and ~Watchdog().

|
protected |
Path to the watchdog. Typically will be /dev/watchdog.
|
protected |
File descriptor for the watchdog device.
Referenced by get_boot_status(), get_info(), get_seconds_remaining_before_reboot(), get_status(), get_timeout(), is_valid(), kick(), magic_close(), set_timeout(), Watchdog(), and ~Watchdog().
|
protected |
Secondary watchdog thread. Only used when start_simple_thread() has been called.
Referenced by start_simple_thread(), and stop_simple_thread().
|
protected |
Secondary watchdog thread. Only used when start_simple_thread() has been called.
Referenced by run_simple_loop(), start_simple_thread(), and stop_simple_thread().
 1.8.11
1.8.11