|
JUCE
v5.1.1-3-g1a0b28c73
JUCE API
|


|
|
JUCE
v5.1.1-3-g1a0b28c73
JUCE API
|
|
Stores a 3D orientation, which can be rotated by dragging with the mouse. More...
#include <juce_Draggable3DOrientation.h>
Public Types | |
| typedef Quaternion< float > | QuaternionType |
| typedef Vector3D< float > | VectorType |
Public Member Functions | |
| Draggable3DOrientation (float objectRadius=0.5f) noexcept | |
| Creates a Draggable3DOrientation, initially set up to be aligned along the X axis. More... | |
| Draggable3DOrientation (const Quaternion< float > &quaternionToUse, float objectRadius=0.5f) noexcept | |
| Creates a Draggable3DOrientation from a user-supplied quaternion. More... | |
| QuaternionType & | getQuaternion () noexcept |
| Provides direct access to the quaternion. More... | |
| Matrix3D< float > | getRotationMatrix () const noexcept |
| Returns the matrix that should be used to apply the current orientation. More... | |
| template<typename Type > | |
| void | mouseDown (Point< Type > mousePos) noexcept |
| Begins a mouse-drag operation. More... | |
| template<typename Type > | |
| void | mouseDrag (Point< Type > mousePos) noexcept |
| Continues a mouse-drag operation. More... | |
| void | reset (const VectorType &axis) noexcept |
| Resets the orientation, specifying the axis to align it along. More... | |
| void | setRadius (float newRadius) noexcept |
| Sets the size of the rotated object, as a proportion of the viewport's size. More... | |
| void | setViewport (const Rectangle< int > &newArea) noexcept |
| Sets the viewport area within which mouse-drag positions will occur. More... | |
Private Member Functions | |
| Point< float > | mousePosToProportion (const Point< float > mousePos) const noexcept |
| VectorType | projectOnSphere (const Point< float > pos) const noexcept |
| QuaternionType | rotationFromMove (const VectorType &from, const VectorType &to) const noexcept |
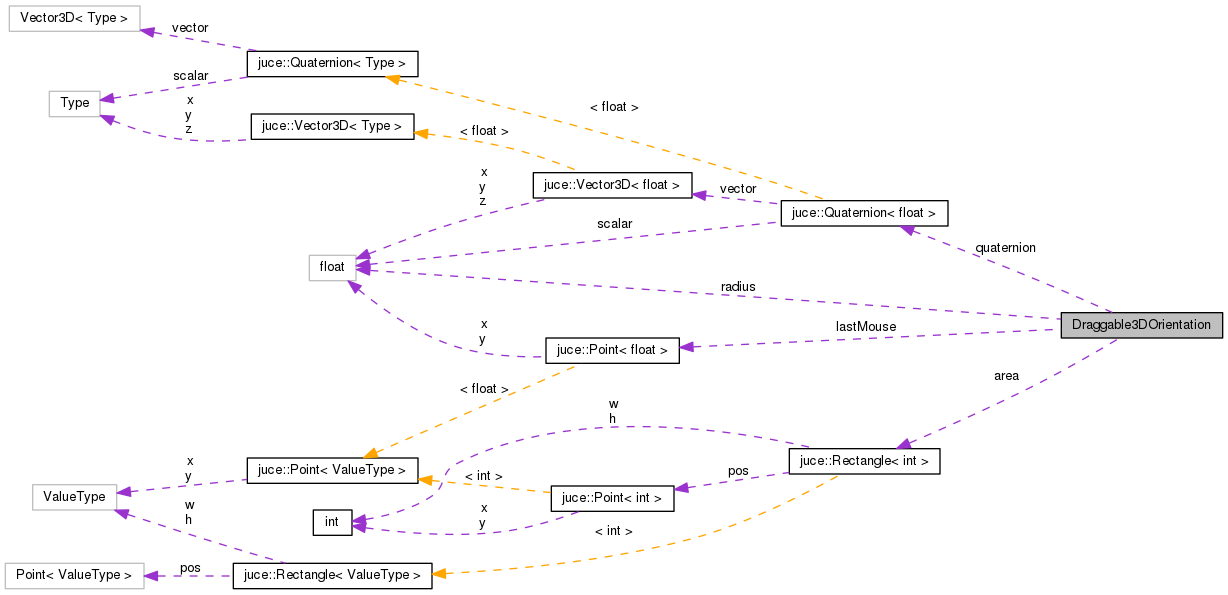
Private Attributes | |
| Rectangle< int > | area |
| Point< float > | lastMouse |
| QuaternionType | quaternion |
| float | radius |
Stores a 3D orientation, which can be rotated by dragging with the mouse.
| typedef Quaternion<float> Draggable3DOrientation::QuaternionType |
| typedef Vector3D<float> Draggable3DOrientation::VectorType |
|
inlinenoexcept |
Creates a Draggable3DOrientation, initially set up to be aligned along the X axis.
|
inlinenoexcept |
Creates a Draggable3DOrientation from a user-supplied quaternion.
|
inlinenoexcept |
Provides direct access to the quaternion.
References quaternion.
|
inlinenoexcept |
Returns the matrix that should be used to apply the current orientation.
References Quaternion< Type >::getRotationMatrix(), and quaternion.
|
inlinenoexcept |
Begins a mouse-drag operation.
You must call this before any calls to mouseDrag(). The position that is supplied will be treated as being relative to the centre of the rectangle passed to setViewport().
References lastMouse, and mousePosToProportion().
|
inlinenoexcept |
Continues a mouse-drag operation.
After calling mouseDown() to begin a drag sequence, you can call this method to continue it.
References lastMouse, mousePosToProportion(), projectOnSphere(), quaternion, and rotationFromMove().
|
inlineprivatenoexcept |
References Rectangle< ValueType >::getCentreX(), Rectangle< ValueType >::getCentreY(), Rectangle< ValueType >::getHeight(), Rectangle< ValueType >::getWidth(), jassert, juce::jmin(), and scale.
Referenced by mouseDown(), and mouseDrag().
|
inlineprivatenoexcept |
References radius.
Referenced by mouseDrag().
|
inlinenoexcept |
Resets the orientation, specifying the axis to align it along.
References quaternion.
|
inlineprivatenoexcept |
References Quaternion< Type >::fromAngle(), jlimit(), Vector3D< Type >::lengthIsBelowEpsilon(), and Vector3D< Type >::xAxis().
Referenced by mouseDrag().
|
inlinenoexcept |
Sets the size of the rotated object, as a proportion of the viewport's size.
References juce::jmax(), and radius.
Sets the viewport area within which mouse-drag positions will occur.
You'll need to set this rectangle before calling mouseDown. The centre of the rectangle is assumed to be the centre of the object that will be rotated, and the size of the rectangle will be used to scale the object radius - see setRadius().
References area.
Referenced by setViewport().
|
private |
Referenced by mouseDown(), and mouseDrag().
|
private |
Referenced by getQuaternion(), getRotationMatrix(), mouseDrag(), and reset().
|
private |
Referenced by projectOnSphere(), and setRadius().
 1.8.13
1.8.13